Experience
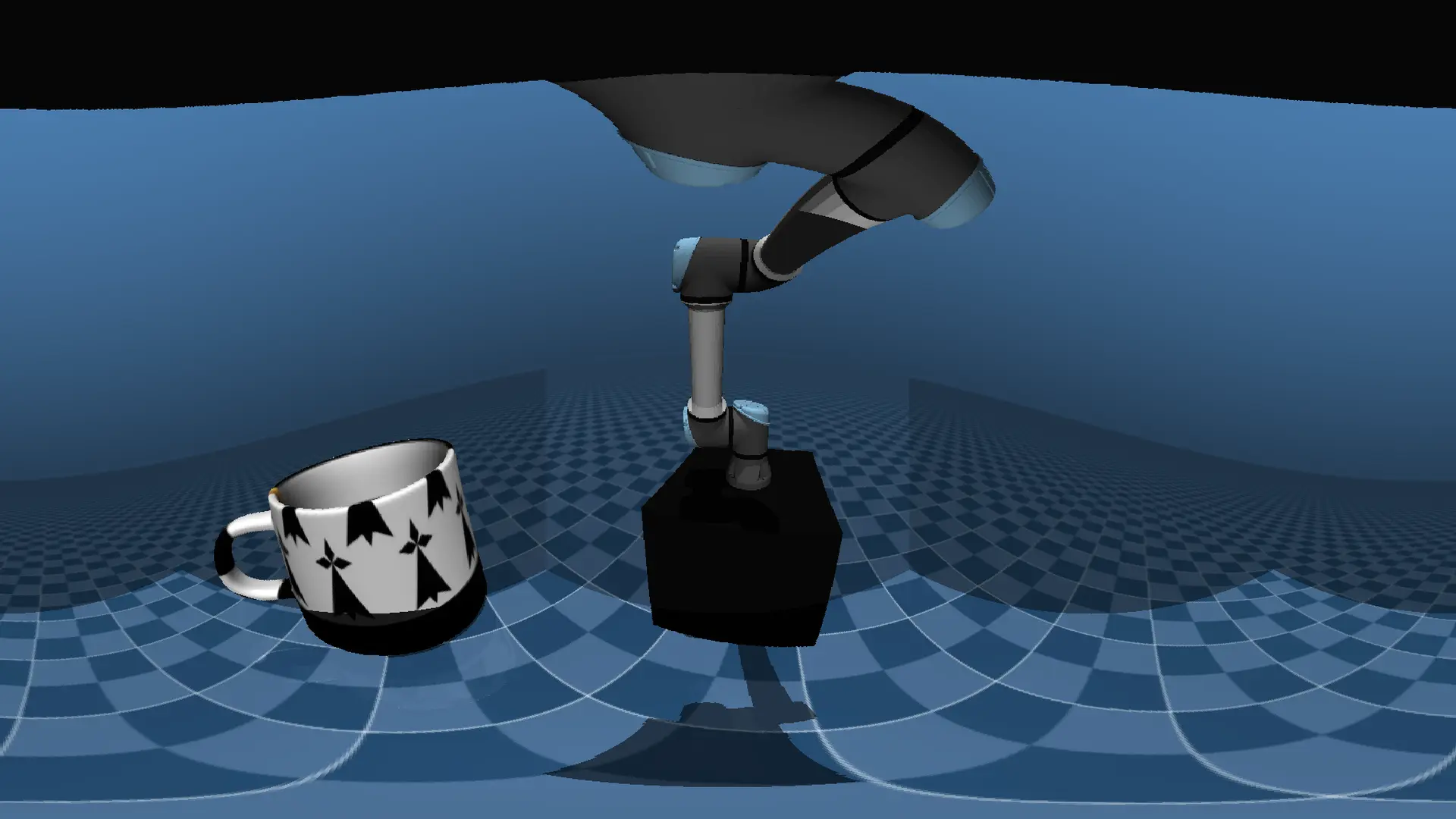
Joint Robotics Laboratory
AIST, Tsukuba, Japan
Research assistant in visual servoing : impact of robot’s self-view in visual servoing using 360° cameras, and impact of masking strategies on the performances
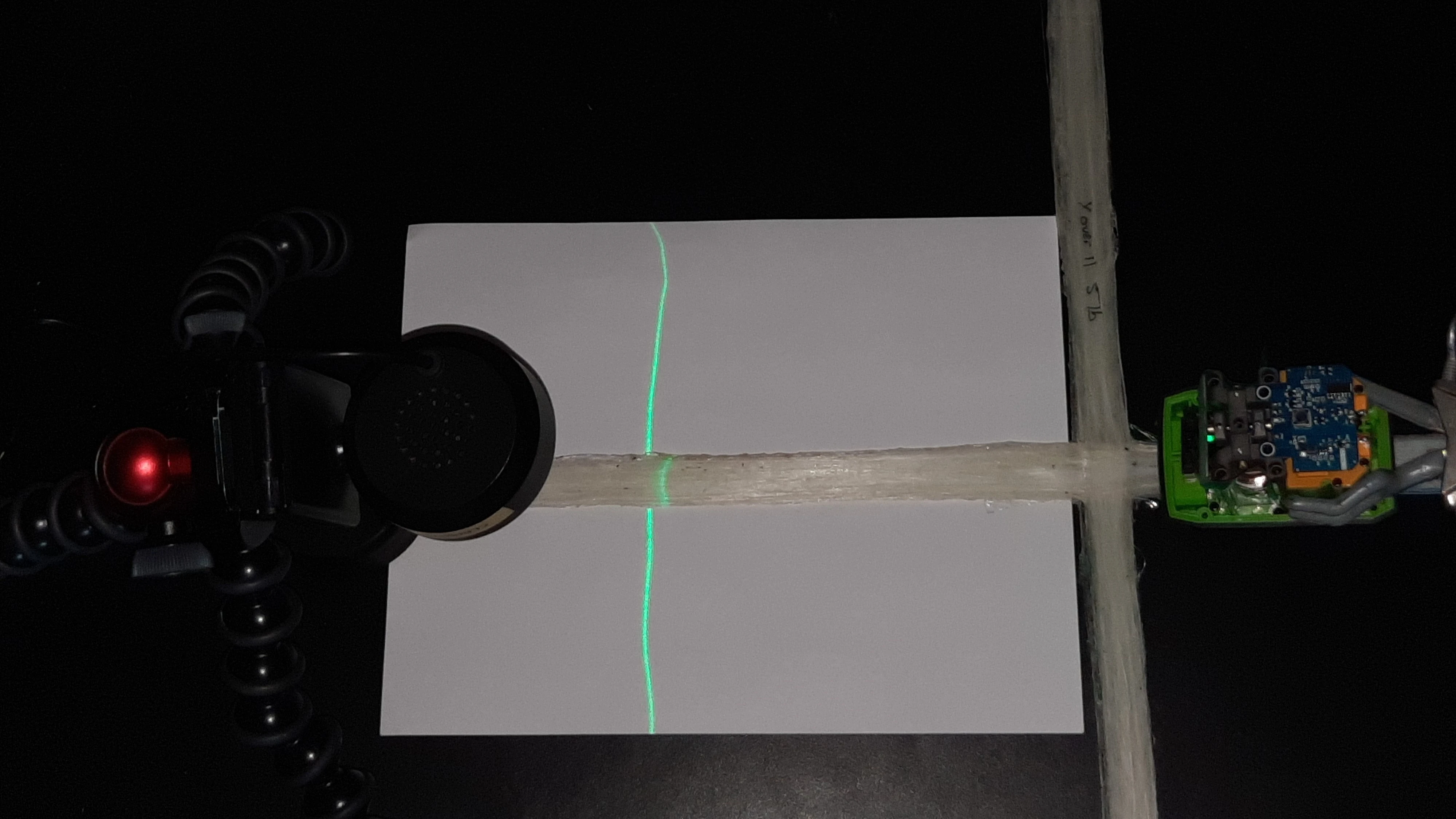
Colorado State University
Fort-Collins, CO, USA
Intern in image processing : Design and prototype of a laser-scanner for real-time width estimation during a innovative 3D-printing process.
ENSTA Bretagne
Brest, France
Sessional lecturer : Teaching programming for international MSc students, from loops to Object-Oriented Programming. Objective : giving them prerequisites for robotic programming.
ENSTA Bretagne
Brest, France
Intern in visual state-estimation : real-time underwater pose-estimation using buoys recognition and interval-based inversion of camera equations.
Conservatoire National des Arts et Métiers
Remotely, France
Intern in material simulation : Finite-elements modelling of a Gallic chariot in order to explain its durability and resistance.
Education
ENSTA Bretagne (Brest, France)
Engineering degree in mobile robotics + MSc. ISC - SDS
ENS of Rennes (Rennes, France)
- MSc. in Engineering Sciences (ISC, Teaching track, spec. Computer Engineering),
- BSc. in Sciences for the Engineer (ISC - SPI),
- BSc. in Electrical Engineering, Energy and Automation,
- Additionnal training & projects.